

软硬结合板厂浅谈车载毫米波雷达
软硬结合板厂了解到,自动驾驶系统中毫米波雷达是常见的传感器配置之一,由于其具有穿透力强(不受烟、雾、灰尘影响)、可全天候使用、性能稳定等特点。因此毫米波雷达成为弥补激光、摄像头等其他传感器在车载应用中所不具备的使用场景。
出于此,来梳理一下毫米波雷达的资料。
01.
毫米波雷达原理
毫米波雷达本质是利用电磁波信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射信号,来确定物体的距离、速度和角度。其波长范围为1~10mm,频率范围为30~300GHz。

但是由于雷达频率受各国政府严格管控,因此车载毫米波雷达的应用频段主要集中在24G、60G、77G、79GHz这几个频率的应用。
02.
毫米波雷达分类
按工作方式来看,毫米波雷达分为脉冲类型和连续波类型,连续波类型又细分为CW(恒频连续波,只能测速不能测距)、FSK(频移键控连续波、可探测单个目标的具体和速度)、FMCW(调频连续波,可对多个目标实现测距和测速,分辨率高,技术成熟)。
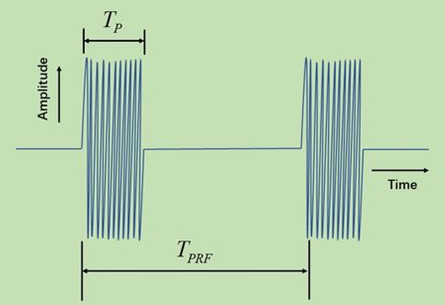
脉冲雷达工作原理:脉冲工作方式可以将发射波和回波区分出来,同时可对比接收回波与发射信号中不同频率,利用多普勒效应得到目标的速度信息。也可以利用回波的时间信息得到距离信息。该方式数据处理原理较简单,但由于单次脉冲需求功率大,存在间歇期的盲区,在当前毫米波雷达产品中未被采用。
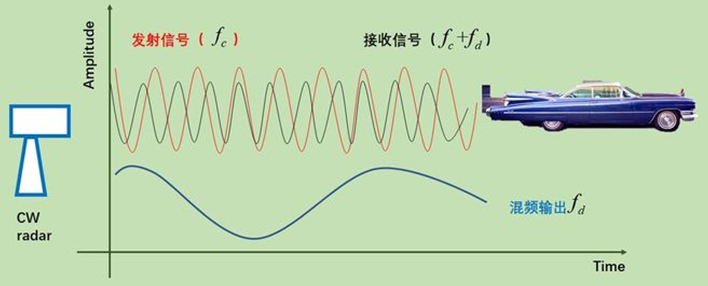
CW恒频连续波雷达工作原理:对接收信号与发射信号的混频可以得到目标的多普勒频率进而得到速度信息。但是由于是连续波,不能测得发射信号的来回时间。因此CW雷达不能进行距离测量,只能实现对目标的速度测量。
FMCW雷达工作原理:FMCW雷达的发射频率随时间变化呈线性变化,这样在发射信号里面可携带时间信息。高频信号由压控振荡器产生,通过功率分配器将一部分经过额外放大后馈送至发射天线,另一部分耦合至混频器,与接收的回波混频后低通滤波,得到基带差频信号,经过模数转换后送至信号处理器处理。这样得到的信号既能得到时间信息,也可以得到多普勒效应特征点。因此可同时测量速度和距离信息。
03.
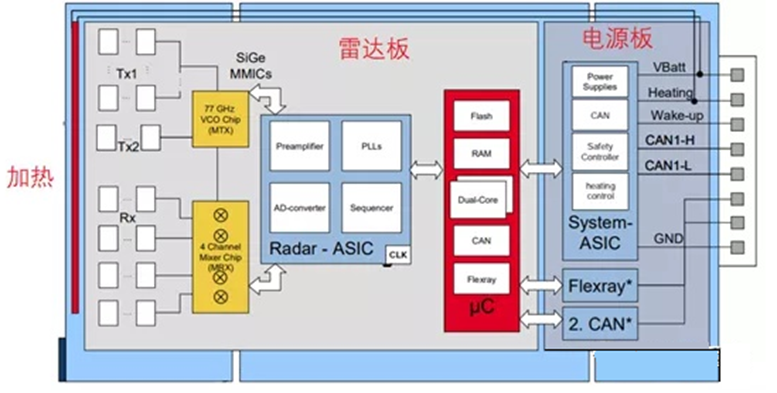
毫米波雷达的数据传输
雷达芯片自带数据处理能力,其一般有两种信号传递方式:
1.雷达直接给出提供32个原始目标,并且告知是静止还是运动目标。在这种模式下,需要主机厂自行结合视觉算法,来判断静止物体是汽车还是其他障碍物。
2.雷达控制器基于毫米波的RCS反射面积和不同帧之间反射点情况,从32个原始目标中筛选出功能安全目标——即车辆需要做出反应的目标。
因此在这两种模式下传递的信号其实已经属于低数据量的特征点,故雷达与控制器之间的数据传输采用传统的CAN通讯。
04.
毫米波雷达的优缺点
线路板厂开头的时候就大致描述了毫米波雷达的具有的优质特性,但是缺点也难以避免,比如毫米波雷达无法提供高度信息,空间分辨率一般,并且严重的是,由于毫米波雷达的工作方式是利用多普勒效应来检测目标的,这就会导致对于静态目标产生漏检的情况,导致自动驾驶系统做出错误的决策。
另外由于毫米波雷达芯片基本被博世、NXP、TI垄断,其中博世和NXP又不对外供货,导致国内企业基本用的是TI的芯片,这也导致同质化竞争特别严重,另外在PCB基材以及结构布局对雷达性能很敏感,基本上这一块也受国外企业垄断,比如罗杰斯等。
05.
毫米波雷达的发展方向
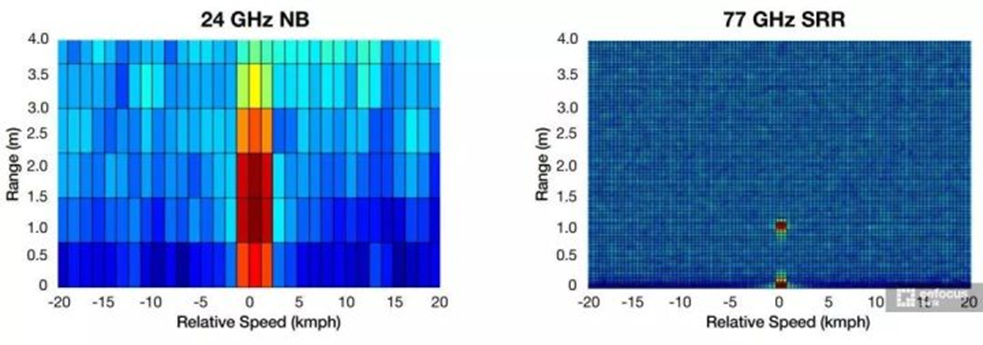
1.前向MRR和LRR往高频率77/79GHz方向演化。
2.毫米波雷达对方位的探测,利用的是波长短的特性,使用阵列天线来构成窄波束。实现一个雷达覆盖较宽的方位角。
3.提高雷达频率,在保持相同增益的条件下,天线孔径可随波长的平方倍数减少。对应雷达尺寸也可降低。
4.同时孔径减小可提供更窄的波束,雷达的速度,位移,物体尺寸的探测精度可大幅度提高。
以上就是PCB厂整理的车载毫米波雷达相关知识!
ps:部分图片来源于网络,如有侵权,请联系我们删除
推荐深联新闻
- PCB厂的线路板表面处理工艺有哪些?
- 【干货】为什么PCB会变形弯曲?如何解决?
- 深联电路清明放假通知,它来啦!
- 一文读懂软硬结合板,关键要点有哪些?
- PCB 材料结构特性怎样决定其分类?
- 汽车智能座舱线路板你了解吗?
- 知识科普:什么是高密度互连(HDI)?
- 手机无线充软板怎样优化设计实现轻薄化?
- 随着智能驾驶升级,汽车激光雷达线路板如何实现技术革新?
- 柔性电路板在新能源汽车动力电池模块中的应用进展

总共 - 条评论【我要评论】